| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ņ`Ū╔╩ų╩ŪÖCŲ„╚╦▓┘ū„║═äėū„ł╠ąąĄ──®Č╦╣żŠ▀Ż¼į┌ÖCŲ„╚╦īWLė“ī┘ė┌─®Č╦ł╠ąąŲ„Ą─ĘČ«ĀĪŻÅ─ ▀\äėīWĄ─ė^³c┐┤Ż¼ņ`Ū╔╩ųąĶØMūŃā╔éĆŚl╝■Ż║ųĖĻP╣Ø▀\äėĢr─▄╩╣╬’¾w«a╔·╚╬ęŌ▀\äėĪóųĖĻP╣Ø╣╠Č©Ģr─▄═Ļ╚½Ž▐ųŲ╬’¾wĄ─▀\äėŻ¼░┤šš▀\äėīW└ĒšōŻ¼ØMūŃ╔Ž╩÷Śl╝■ų┴╔┘ę¬ 3 éĆ╩ųųĖ║═ 9 éĆūį ė╔Č╚ĪŻ
ę“┤╦Ż¼╬ęéāČ©┴xņ`Ū╔╩ų╩ŪųĖöĄĪ▌3Ż¼ūįė╔Č╚Ī▌9 Ą──®Č╦ł╠ąąŲ„ĪŻ└²╚ń╚š▒ŠĄ─ TWENDY-ONE ÖCŲ„╚╦Ż¼Ųõņ`Ū╔╩ųōĒėą 4 Ė∙╩ųųĖ║═ 13 éĆūįė╔Č╚ĪŻ
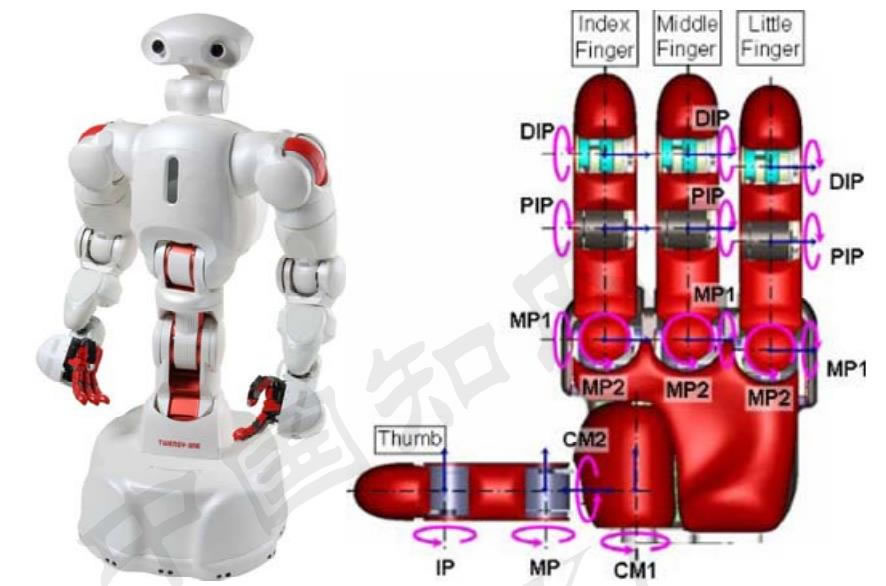
Å─ą╬æB║═╣”─▄╔Ž┐┤Ż¼ņ`Ū╔╩ųĮøÜv┴╦ā╔ųĖŖA│ųŲ„ĪóČÓųĖūź│ų╩ų║═ČÓųĖņ`Ū╔╩ų╚²éĆ░lš╣ļAČ╬Ż║
ā╔ųĖŖA│ųŲ„
ā╔ųĖŖA│ųŲ„═©▀^─ŻĘ┬╩ųųĖĄ─ŖA│ų▀\äėüĒūź│ų╬’¾wŻ¼─▄ē“į┌ł╠ąąäėū„Ą─═¼ĢrŖAūĪ║═╦╔ķ_─┐ś╦ ╬’¾wĪŻŲõā׳c╩ŪĮYśŗ║åå╬Ż¼▀\äėą╬╩ĮĘĆČ©Ż¼╣żū„┐╔┐┐Ż¼į┌╣żśI¼Fł÷│Żæ¬ė├ė┌─┐ś╦┴Ń▓┐╝■Ą─ ŖA╚ĪĪó░ß▀\ĪóōQ╬╗Īóčb┼õĄ╚ĪŻĄ½ė╔ė┌╚▒Ę”╩ųųĖĄ─ņ`╗ŅąįŻ¼▓╗─▄ī”Å═ļsą╬ĀŅĄ──┐ś╦▀Mąąūź│ųŻ¼ ¤oĘ©ī”─┐ś╦╬’¾wīŹ╩®▓┘ū„ĪŻįōŅÉŖA│ųŲ„ęčėąČÓĘNś╦£╩╗»Ą─«aŲĘŻ¼└²╚ńĄ┬ć° SCHUNK ╣½╦ŠĄ─ ÜŌäėŲĮąąū”ŖA│ųŲ„ĪóFESTO ╣½╦ŠĄ─ÜŌäėŖA│ųŲ„Ą╚ĪŻ
ČÓųĖūź│ų╩ų
ČÓųĖūź│ų╩ų░┤šš╣”─▄▓╗═¼Ęų×ķ┬ōäėą═ūź│ų╩ųĪóČÓĻP╣Ø╩ųųĖūź│ų╩ų║═▄ø¾wČÓųĖūź│ų╩ųĪŻ
ČÓųĖņ`Ū╔╩ų
ÖCŲ„╚╦ČÓųĖņ`Ū╔╩ųĄ─蹊┐╩╝ė┌ 20 ╩└╝o 70 ─Ļ┤·Ż¼ėą 3 ┐ŅĄõą═┤·▒Ē«aŲĘŻ¼ Ęųäe╩Ū╚š▒ŠĄ─ OkadaĪó├└ć°Ą─ Stanford/JPL ║═ Utah/MITĪŻ▀@╚²ų╗ņ`Ū╔╩ų╩Ū蹊┐│§╩╝ ļAČ╬Ą─Ąõą═┤·▒ĒŻ¼×ķ║¾└mĘ┬╚╦ą═ČÓųĖņ`Ū╔╩ų蹊┐Į©┴ó┴╦└Ēšō╗∙ĄAĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ Ž¹ČŠÖCŲ„╚╦ārĖ± š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ║╦╦ß▓╔śėÖCŲ„╚╦ ÖCŲ„╚╦┤·╣żÅS ųŪ─▄┼õ╦═ÖCŲ„╚╦ ćŖņFŽ¹ČŠÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ Ž¹ÜóÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |