| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
╦∙ų^╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)╩ŪųĖ▀\(y©┤n)äė(d©░ng)ÖC(j©®)śŗ(g©░u)į┌Č■ŠSŲĮ├µ╔ŽŻ¼Å─«ö(d©Īng)Ū░╬╗ų├─▄ē“Ž“╚╬ęŌĘĮŽ“▀\(y©┤n)äė(d©░ng)Ż¼Č°▓╗ąĶę¬▄ć¾wĖ─ūāū╦æB(t©żi)ĪŻ─┐Ū░╬ęéā╦∙ęŖ▀^Ą─J┤¾ČÓöĄ(sh©┤)Ą─▌å╩ĮęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)į┌š{(di©żo)š¹ ▀\(y©┤n)äė(d©░ng)ĘĮŽ“Ģr(sh©¬)Č╝ąĶę¬ę╗Č©Ą─╗ž▐D(zhu©Żn)░ļÅĮŻ¼Č°╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)┐╔ęį╩╣╗ž▐D(zhu©Żn)░ļÅĮ×ķ0ĪŻ╚½ĘĮ ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)▒╚Ųš═©Ą─ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)į┌─│ą®ł÷║Žėą├„’@ā×(y©Łu)įĮąįĪŻ└²╚ńŻ¼«ö(d©Īng)▄ć▌vį┌¬MšŁ╗“ ōĒöDĄ─┐šķgā╚(n©©i)╣żū„Ģr(sh©¬)Ż¼└¹ė├╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Ą─┴Ń╗ž▐D(zhu©Żn)░ļÅĮĄ─╠ž³c(di©Żn)Ż¼╩╣Ųõ─▄ņ`╗Ņūį╚ń Ąž┤®ąąĪŻ┴Ē═ŌŻ¼╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)┐╔ęįī”ūį╝║╦∙╠ÄĄ─╬╗ų├▀M(j©¼n)ąą╝Ü(x©¼)╬óĄ─š{(di©żo)š¹Ż¼ę“┤╦Ż¼į┌ąĶę¬£╩(zh©│n)┤_Č©╬╗║═GŠ½Č╚▄ē█EĖ·█ÖĄ─Ģr(sh©¬)║“ę▓ę¬Ū¾▀\(y©┤n)äė(d©░ng)ÖC(j©®)śŗ(g©░u)Š▀éõ╚½ĘĮ╬╗ęŲäė(d©░ng)Ą──▄┴”ĪŻ
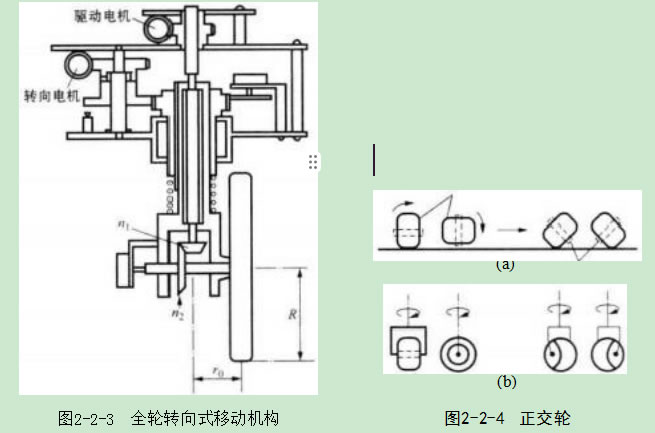
¼F(xi©żn)į┌▒╚▌^│ŻęŖĄ─╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)ėąŻ║┐šÜŌæęĖĪ╩ĮŻ¼╚½▌å▐D(zhu©Żn)Ž“╩ĮŻ¼╚ńłD2-2-3 ╦∙╩ŠĪŻ¹£┐©╝{─Ę▌å(MECANUM)S~7, Ū“┬─Ħ╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)8Ą╚ĪŻ
╚š▒ŠļŖ═©┤¾Ą─įĮ╔Į║VĄ╚╚╦čąųŲ┴╦ę╗ĘNŪ“▌å“ī(q©▒)äė(d©░ng)╩Į╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦9,10ĪŻłD 2-2-4×ķŲõĮY(ji©”)śŗ(g©░u)łDĪŻ╦³ė╔ę╗éĆ(g©©)Ū“ą╬▌åśŗ(g©░u)│╔Ż¼═Ō▓┐╩Ūę╗éĆ(g©©)╣░ą╬ÜżŻ¼ęŲäė(d©░ng)║═┐žųŲÖC(j©®)śŗ(g©░u)į┌ ▌åĄ─ā╚(n©©i)▓┐Ż¼ė╔╚²éĆ(g©©)ų▒┴„ļŖÖC(j©®)Ęųäe“ī(q©▒)äė(d©░ng)Ū“▌å(special wheel)Īó╣░ ¾w(arched body)║═ ┐ž ųŲ ╣░(controlling arch),ęįīŹ(sh©¬)¼F(xi©żn)╚½ĘĮ╬╗ęŲäė(d©░ng)╣”─▄ĪŻ
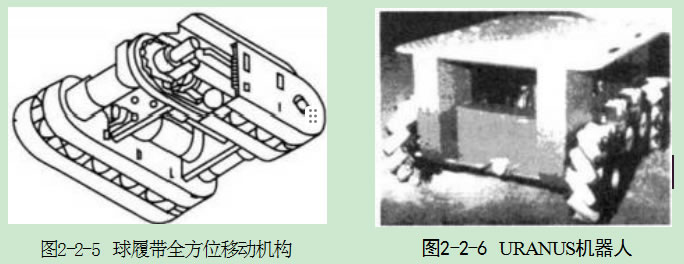
1992─ĻŻ¼╚š▒Š╔±æ¶ųŲõō╦∙Ą─╬„┤©╗╬ŲĮĄ╚╚╦čąųŲ┴╦ę╗ĘNŪ“┬─Ħ╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®) śŗ(g©░u)3-11.123,ĮY(ji©”)śŗ(g©░u)╩ŠęŌłDęŖłD2-2-5ĪŻįō╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)ėąā╔Śl┬─ĦŻ¼├┐éĆ(g©©)┬─Ħā╚(n©©i)ŲĮ ąąĘ┼ų├ā╔ŚlŚUŻ¼Ęųäeė╔ų▒┴„╦┼Ę■ļŖÖC(j©®)═©▀^┬─Ħ“ī(q©▒)äė(d©░ng)Ż¼Č°├┐Śl┬─Ħā╚(n©©i)Ė„ūįĘųäeĘ┼╚ļ2éĆ(g©©)Ž─zŪ“Ż¼═©▀^ā╔Śl┬─ĦĄ─▀\(y©┤n)äė(d©░ng)ĮM║Ž╝░Ū“Ą─▐D(zhu©Żn)äė(d©░ng)╝┤┐╔īŹ(sh©¬)¼F(xi©żn)╚½ĘĮ╬╗ęŲäė(d©░ng)╣”─▄ĪŻ
┴Ē═Ō▀Ćėąę╗ĘNĘQ×ķMecanum Ą─╚½ĘĮ╬╗▌åĪŻė╔łD2-2-6╦∙╩ŠĪŻ▀@ĘN╠ž╩ŌĄ─▄ć ▌å╩Ū╚Ąõ Mecanum ╣½╦ŠĄ─īŻ└¹ĪŻ═©▀^īóČÓéĆ(g©©)(│Ż×ķ3éĆ(g©©)╗“4éĆ(g©©))Mecanum ▌åęįę╗ Č©Ą─ĘĮ╩ĮĮM║ŽŻ¼Š═┐╔ęį╩╣ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Š▀éõ╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)─▄ĪŻ├└ć°┐©ā╚(n©©i)╗∙-├Ę┬Ī┤¾īW(xu©”)Ą─ Muir.Charles║═Neuman Ą╚╚╦čąųŲ│÷┴╦ę╗┼_Š▀ėą╦─éĆ(g©©)Mecanum ▌åĄ─╚½ĘĮ╬╗ęŲäė(d©░ng) ÖC(j©®)Ų„╚╦Ī¬Ī¬URANUS ĪŻ ▀@ĘNÖC(j©®)Ų„╚╦ūį▌dļŖį┤Īóėŗ(j©¼)╦ŃÖC(j©®)║═ę╗Č©öĄ(sh©┤)┴┐Ą─é„ĖąŲ„Ż¼┐╔ ęįĘŪ│Żņ`╗ŅĄžį┌Ąž├µ╔Žūįų„▀\(y©┤n)äė(d©░ng)ĪŻė╔ė┌▀@ĘNMecanum ▌åĮY(ji©”)śŗ(g©░u)Šo£ÉŻ¼▀\(y©┤n)äė(d©░ng)ņ`╗ŅŻ¼ę“ ┤╦▒ŠšnŅ}öM╠ß│÷▓╔ė├▀@ĘN▄ć▌åū„×ķ▒┌├µęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ą─ęŲäė(d©░ng)ÖC(j©®)śŗ(g©░u)Ż¼īŹ(sh©¬)“×(y©żn)ūC├„╩╣ė├ │╔╣”ĪŻ
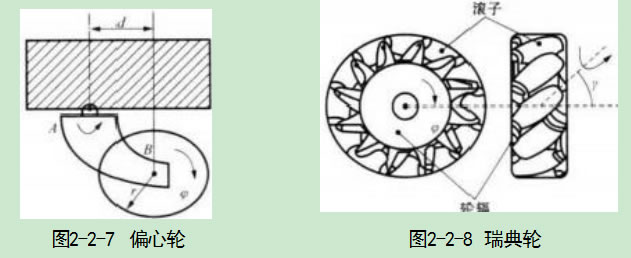
Campion G į┌╬─½I(xi©żn)[13]ųąīó▌åūėäØĘų×ķé„Įy(t©»ng)▌åŽĄŻ¼░³└©╣╠Č©ĘĮŽ“▌å(fixed wheel)Īó═¼ ą─ ĘĮ Ž“ ▌å(centered orientable wheel)║═Ų½ą─ĘĮŽ“▌å(off-centered orientable wheel)(ęŖłD2-2-7),║═ūįė╔ĘĮŽ“▌åŽĄŻ¼╚ń╚Ąõ(Swedish) ▌åĪóŪ“▌åĄ╚ĪŻ Swedish ▌åę▓ĘQMecanum ▌åŻ¼ė╔▌å▌Ś║═╣╠Č©į┌═Ōų▄Ą─įSČÓąĪØLūėśŗ(g©░u)│╔Ż¼▌åūė║═ØL ūėų«ķgĄ─ŖAĮŪ×ķ”├,═©│ŻŖAĮŪ”├×ķ45ĪŃ,╚ńłD2-2-8╦∙╩Š
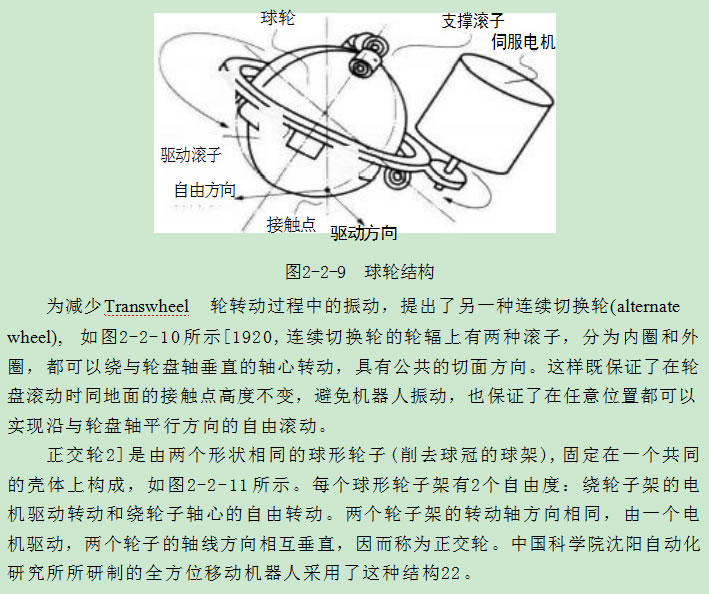
Ū“ ▌å(ball wheel)ė╔ę╗éĆ(g©©)ØLäė(d©░ng)Ū“¾wĪó ę╗ĮMų¦ō╬ØLūė║═ę╗ĮM“ī(q©▒)äė(d©░ng)ØLūėĮM│╔Ż¼Ųõųą ų¦ō╬ØLūė╣╠Č©į┌▄ćĄū▒P╔ŽŻ¼“ī(q©▒)äė(d©░ng)ØLūė╣╠Č©į┌ę╗éĆ(g©©)┐╔ęį└@Ū“¾wųąą─▐D(zhu©Żn)äė(d©░ng)Ą─ų¦╝▄╔ŽŻ¼╚ń łD2-2-9╦∙╩Š15.16]ĪŻ├┐éĆ(g©©)Ū“▌å╔ŽĄ─“ī(q©▒)äė(d©░ng)ØLūėė╔ę╗éĆ(g©©)ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ż¼╩╣Ū“▌å└@“ī(q©▒)äė(d©░ng)ØLūė ╦∙śŗ(g©░u)│╔ŲĮ├µĄ─Ę©ŠĆ▐D(zhu©Żn)äė(d©░ng)Ż¼═¼Ģr(sh©¬)┐╔ęį└@┤╣ų▒Ą─▌SŠĆūįė╔▐D(zhu©Żn)äė(d©░ng)ĪŻ▌åūėĄ─“ī(q©▒)äė(d©░ng)┴”╩ŪØLūė ║═▌åūėĄ──”▓┴┴”Ż¼╩╣Ą├▌åūėĄ─“ī(q©▒)äė(d©░ng)┴”║═╦┘Č╚╩▄ĄĮŽ▐ųŲŻ¼▀@ę▓╩ŪŪ“▌åĄ─╚▒³c(di©Żn)ĪŻ═¼Ģr(sh©¬)Ż¼ ▌åūėį┌Ąž├µØLäė(d©░ng)▀^│╠ųą╬³ĖĮĄ─ę╗ą®╗ęēmŻ¼Ģ■(hu©¼)į┌▌åūė║═ØLūėĄ─Įėė|³c(di©Żn)Ęe└█Ż¼ė░Ēæā╔š▀ ų«ķgĄ──”▓┴┴”Ż¼╩╣▌åūė┤“╗¼Ż¼╬ęéāį┌╩╣ė├ØLäė(d©░ng)╩¾ś╦(bi©Īo)Ģr(sh©¬)Č╝Ģ■(hu©¼)ėą═¼śėĄ─Ėą╩▄ĪŻę“Č°Ż¼ī” Ū“▌åĄ─Ė─▀M(j©¼n)ĘĮĘ©╩Ūėąą¦į÷╝ėØLūė║═Ū“¾wų«ķgĄ──”▓┴“ī(q©▒)äė(d©░ng)┴”ĪŻ
▀B└m(x©┤)ŪąōQ▌åĄ─╗∙ĄA(ch©│)×ķTranswheel ▌åŻ¼ė╔ę╗éĆ(g©©)▌å▒P║═╣╠Č©į┌▌å▒P═Ōų▄Ą─ØLūėśŗ(g©░u) │╔ĪŻ▌å▒P▌Są─═¼ØLūė▌Są─┤╣ų▒Ż¼▌å▒P└@▌Są─ė╔ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)▐D(zhu©Żn)äė(d©░ng)Ż¼ØLūėę└┤╬┼cĄž├µĮė ė|Ż¼▓ó┐╔└@ūį╔Ē▌Są─ūįė╔▐D(zhu©Żn)äė(d©░ng)Ż¼ĮY(ji©”)śŗ(g©░u)╚ńłD2-2-9╦∙╩ŠĪŻ▓╔ė├▀@ĘN▌åūėįO(sh©©)ėŗ(j©¼)┴╦ÄūĘN▓╗ ═¼Ą─ūŃŪ“ÖC(j©®)Ų„╚╦17.18],╦∙┤µį┌Ą─å¢Ņ}┼cSwedish ▌åŽÓ╦ŲŻ¼Š═╩Ū▌å▒P▐D(zhu©Żn)äė(d©░ng)Ģr(sh©¬)Ż¼ØLūė═¼ Ąž├µĮėė|▓╗▀B└m(x©┤)Ż¼╩╣ÖC(j©®)Ų„╚╦«a(ch©Żn)╔·š±äė(d©░ng)║═┤“╗¼ĪŻ
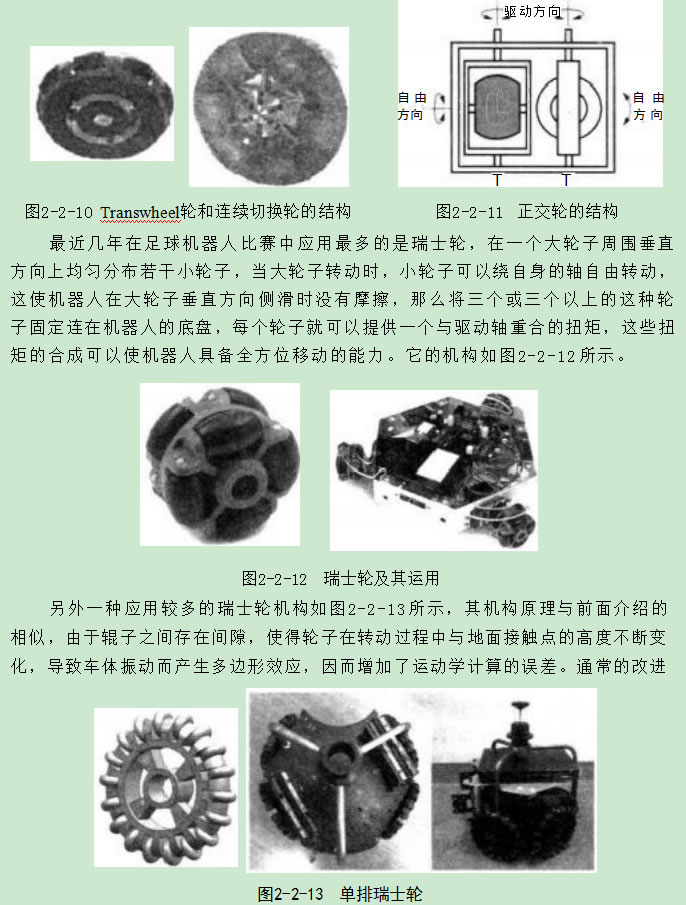
ĘĮĘ©╩Ū▓╔ė├ČÓéĆ(g©©)ØLūėęį£pąĪØLūėų«ķgĄ─ķgŽČĪŻ
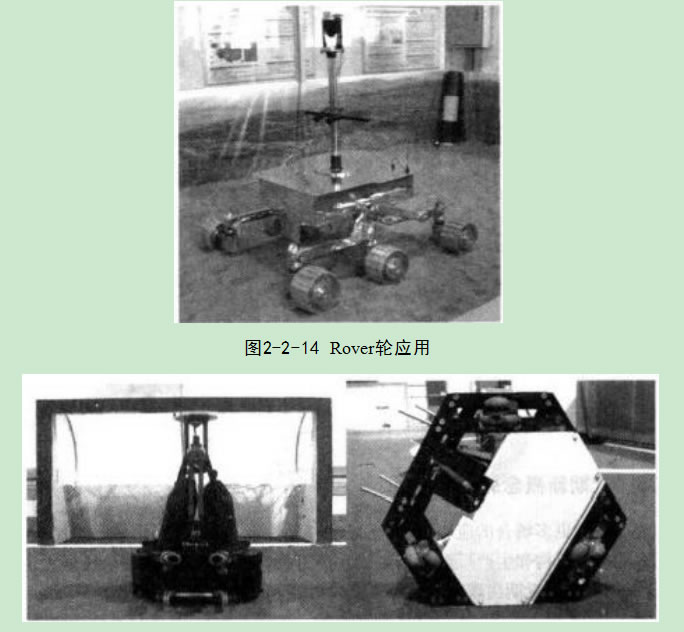
╚½ĘĮ╬╗▌åį┌ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦ŅI(l©½ng)ė“Ą─æ¬(y©®ng)ė├ęčĮø(j©®ng)ĘŪ│ŻÅVĘ║Ż¼ęčĮø(j©®ng)╔µ╝░╔·╗Ņųą║▄ČÓŅI(l©½ng)ė“Ż¼ ░³└©ūŃŪ“ÖC(j©®)Ų„╚╦Īó╚½ĘĮ╬╗▌åę╬Īóį┬Ū“▄ćĪó╣ż│╠▓µ▄ćĄ╚Ż¼ė╔ė┌Ųõ▀\(y©┤n)äė(d©░ng)ąį─▄Ą─ā×(y©Łu)³c(di©Żn)Ż¼╩╣Ųõ æ¬(y©®ng)ė├īóįĮüĒįĮÅVĘ║ĪŻłD2-2- 14×ķ╔Ž║ŻĮ╗═©┤¾īW(xu©”)ķ_░l(f©Ī)Ą─Ą┌╚²┤·į┬Ū“▄ć─ŻöMśėÖC(j©®)ĪŻ łD2-2-15×ķ╔Ž║ŻĮ╗═©┤¾īW(xu©”)ķ_░l(f©Ī)Ą─╚½ĘĮ╬╗ęŲäė(d©░ng)ūŃŪ“ÖC(j©®)Ų„╚╦ĪŻ
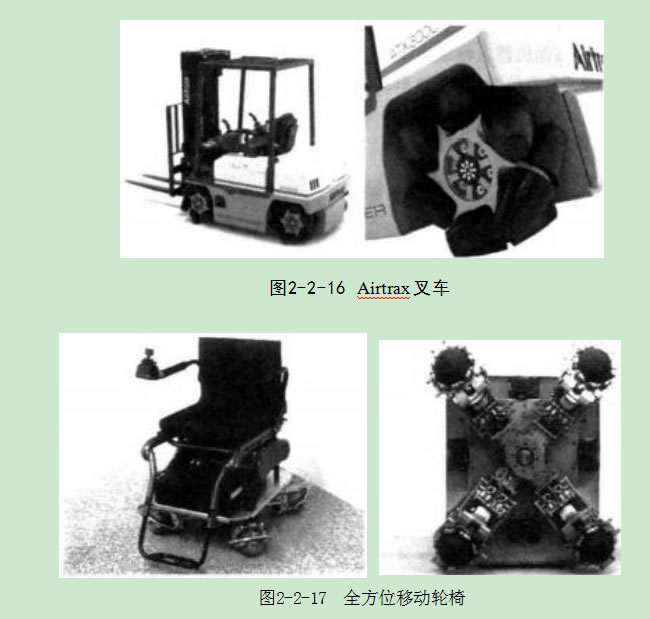
Airtrax ╣½╦Š╩Ū╩└Įń╔ŽDę╗éĆ(g©©)īó╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦æ¬(y©®ng)ė├ė┌╔╠śI(y©©)ķ_░l(f©Ī)Ą─╣½╦ŠŻ¼įō ╣½╦ŠDę╗┤╬╔·«a(ch©Żn)┴╦┤¾ą═╚½ĘĮ╬╗▌åŻ¼▓óŪęīó4éĆ(g©©)┤¾ą═Mecanum ▌åūėū÷│╔╣ż│╠▓µ▄ćŻ¼ ╚ńłD2-2-16╦∙╩ŠŻ¼ų„ę¬ė├ė┌é}Äņžø╬’▀\(y©┤n)▌öė├═ŠŻ¼│²┴╦Š▀ėąę╗░Ń▓µ▄ć╣”─▄═ŌŻ¼╩╣ė├Ė³ ņ`╗ŅŻ¼▓┘ū„Ė³║åå╬ĪŻ
M.Wada Ą╚╚╦▓╔ė├╚½ĘĮ╬╗Ū“▌åįO(sh©©)ėŗ(j©¼)▓óčąųŲ┴╦╚½ĘĮ╬╗ęŲäė(d©░ng)▌åę╬Ż¼╚ńłD2-2-17 ╦∙╩ŠŻ¼═©▀^ėę╩ų▀ģĄ─3ūįė╔Č╚ōuŚU┐╔ęįĘĮ▒ŃĄž┐žųŲÖC(j©®)Ų„╚╦Ą─Ū░▀M(j©¼n)Īó║¾═╦Īó▐D(zhu©Żn)Ž“ĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖC(j©®)Ų„╚╦ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |