| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
Ąõą═Ą─▌å╩ĮęŲäėÖCŲ„╚╦Ą─ÖCśŗŻ¼ė╔▄ć¾wĪó▄ć▌åĪó▄ć▌å-▄ć¾wų«ķg īóā╔š▀ĮY║ŽŲüĒĄ─ų¦ō╬ÖCśŗĪó▄ć▌å“īäėÖCśŗĄ╚śŗ│╔ĪŻ
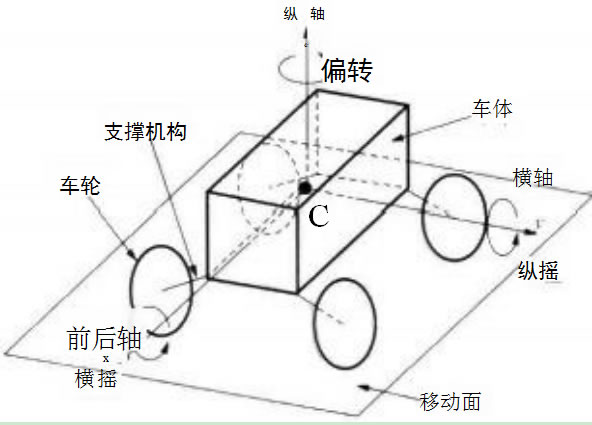
(1)▄ć¾wŻ║▄ć¾w╩Ū▄ć▌åų¦ō╬ÖCśŗĄ─░▓čb╗∙ū∙Ż¼į┌ÖCąĄ╔ŽŲų°øQČ©Ė„éĆ▄ć▌å╬╗ų├ ĻPŽĄĄ─ū„ė├ĪŻ┴Ē═ŌŻ¼╦³į┌ęŲäė├µ┼cĖ„▄ć▌åĪó▄ć▌åų¦ō╬▓┐Ęųų«ķgŲĄĮ“īäė┴”║═ųŲäė┴” Ą╚Ą─┴”é„▀fū„ė├ĪŻį┌īŹ╩®ęŲäėĢrŻ¼ČÓöĄŪķørŽ┬ąĶę¬īó▄ć¾w╔ŽĄ──│╠žČ©╬╗ų├Č©┴x×ķ╗∙£╩³cŻ¼▄ć¾wėąĢrę▓│õ«ö░▓čb┤Ņ▌dÖCąĄ╩ųĄ╚Ą─╗∙ū∙ĪŻ
(2)▄ć▌åŻ║▄ć▌å╩Ū▌å╩ĮęŲäėÖCŲ„╚╦Ą─ęŲäėÖCśŗŻ¼▄ć▌å┼c▄ć¾wīŹ¼FÖCąĄ±Ņ║ŽŻ¼╣▓ ═¼ų¦ō╬▄ć▌vĄ─┘|┴┐Ż¼═¼Ģr└¹ė├╦³ŽÓī”ė┌ęŲäė├µĄ─ūįė╔Č╚Ż¼ŲĄĮĖ─ūā▄ć¾wŽÓī”╬╗ų├Ą─ ū„ė├ĪŻ▄ć▌å▀Ć─▄ī”ęŲäėĦüĒĄ─ø_ō¶«a╔·ŠÅø_ū„ė├Ż¼╗“└¹ė├ūį╔ĒĄ─ūāą╬ĮĄĄ═Įėė|Ąž ├µĄ─ē║ÅŖŻ¼╗“ĮĶų·ė┌▌å╠ź├µĄ─łD╝y╚ĪĄ├Ę└╗¼ą¦╣¹ĪŻ▄ć▌åĄ─ĻPµIå¢Ņ}╩Ū╚ń║╬▀xČ©▓─ ┴ŽĪó▒Ē├µą╬ĀŅ║═ĮYśŗĪŻ
░┤ššėą¤o═Ų▀M┴”╣”─▄Ż¼▄ć▌å┐╔ęįĘų×ķ“īäė▌å║═Å─äė▌åā╔┤¾ŅÉĪŻĖ∙ō■å╬éĆ▄ć▌å Ą─ūįė╔Č╚Ż¼▄ć▌å┐╔äØĘų×ķę╗░Ń▄ć▌åĪóŪ“ą╬▌åĪó╚½ĘĮ╬╗▌åĄ╚ÄūŅÉĪŻ▄ć▌å┼cęŲäėĄž├µų« ķgĄ─Įėė|ģ^Ęų×ķ╗¼äėĮėė|ĪóØLäėĮėė|ā╔ĘNĪŻ
╚ńłD2-1-2╦∙╩ŠŻ¼ÖCŲ„╚╦╔Ž╦∙ė├Ą─▄ć▌å┐╔ęįĘų×ķ╦─┤¾ŅÉŻ║Dę╗┤¾ŅÉ╩Ūį┌▌å╩ĮęŲ äėÖCŲ„╚╦ųąĄ├ĄĮÅVĘ║╩╣ė├Ą─│Żė├▄ć▌åŻ¼╚ńłD2-1-2(a) ╦∙╩ŠŻ¼ŲõĮYśŗ┼c╬ęéā│ŻęŖĄ─ ▄ć▌åŽÓ═¼Ż¼ĘQ×ķś╦£╩▌åŻ¼╦³ėąā╔éĆūįė╔Č╚Ż¼Ęųäe╩Ūć·└@▌å▌S║═Įėė|³cĄ─▐DäėŻ╗Ą┌Č■ŅÉ ×ķąĪ─_▌åŻ¼╚ńłD2-1-2(b) ╦∙╩ŠŻ¼╦³ėą╚²éĆūįė╔Č╚Ż¼ć·└@┤╣ų▒▌SĄ─▐DäėĪóć·└@Ų½ęŲĄ─ ▌å▌S║═Įėė|³cĄ─▐DäėŻ╗Ą┌╚²ŅÉ×ķ╚Ąõ▌åŻ¼═©│ŻĘQ×ķ╚½ĘĮ╬╗▄ć▌åŻ¼╚ńłD2-1-2(c) ╦∙╩ŠŻ¼ Å─įōŅÉ▄ć▌åé╚Ž“ęĢłD┐╔┐┤│÷Ż¼Ųõ▄ć▌å═ŌŠē▓╝ų├Ą─▌üūė▌SŠĆ┼c▄ć▌å▌SŠĆŠ▀ėąę╗Č©ŖA ĮŪĪŻ▀@ĘN▄ć▌åę▓ėą╚²éĆūįė╔Č╚Ż¼ć·└@▌å▌SĪó▌üūė║═Įėė|³cĄ─▐DäėŻ╗Ą┌╦─ŅÉ×ķŪ“ą╬▌åŻ¼ ╚ńłD2-1-2(d) ╦∙╩ŠŻ¼▀@ĘN▄ć▌å┐╔ęįčž╚╬║╬ĘĮŽ“╩▄äė┴”Č°ą²▐DŻ¼Ą½į┌╝╝ągīŹ¼F╔Ž▒╚ Ųõ╦¹▌åūėę¬└¦ļyę╗ą®ĪŻ
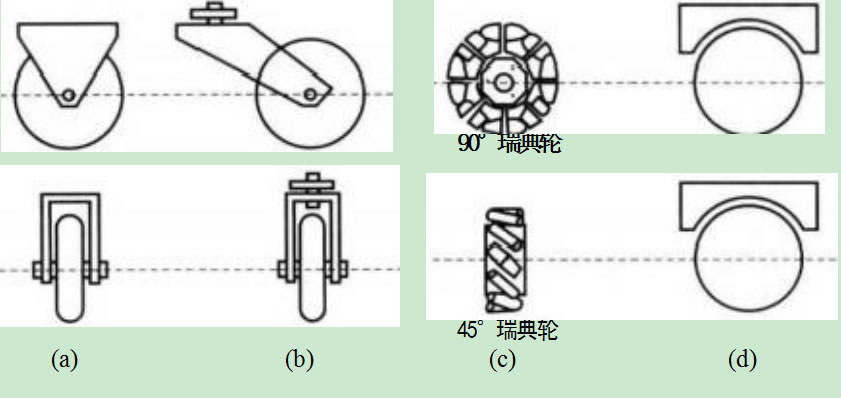
į┌▀@╦─ĘN▌åūėųąŻ¼ś╦£╩▌å║═ąĪ─_▌åėąę╗éĆą²▐Dų„▌SŻ¼ę“Č°į┌Ė▀Č╚ĘĮŽ“╩Ūėą╝s╩° Ą─ĪŻį┌▓╗═¼Ą─▀\äėĘĮŽ“Ż¼ąĶꬎ╚čžų°┤╣ų▒▌S▓┘┐v▌åūėĪŻ▀@ā╔ĘN▌åūėĄ─ų„ę¬▓Ņäe į┌ė┌ś╦£╩▌å┐╔ęį═Ļ│╔▓┘┐vČ°¤oĖ▒ū„ė├Ż¼ę“×ķą²▐Dųąą─Įø▀^Įėė|Ų¼ų°ĄžŻ¼Č°ąĪ─_▌å└@Ų½ą─▌Są²▐DŻ¼į┌▓┘┐vŲ┌ķgĢ■ę²Ųę╗éĆ┴”Ż¼╝ėĄĮÖCŲ„╚╦Ą─Ąū▒PĪŻ╚Ąõ▌å║═Ū“ą╬▌åĄ─įO ėŗ▒╚é„Įy▌å╩▄┴”ĘĮŽ“Ą─╝s╩°╔┘ę╗ą®ĪŻ╚Ąõ▌åĄ─╣”─▄┼cś╦£╩▌åę╗śėŻ¼Ą½╦³į┌┴Ēę╗ĘĮ Ž“«a╔·Ą═Ą─ūĶ┴”Ż¼įōĘĮŽ“ėąĢr┤╣ų▒ė┌│ŻęÄĘĮŽ“Ż¼╚ń╚Ąõ▌å90ĪŃ;ėąĢrį┌ųąķgĮŪČ╚Ż¼╚ń ╚Ąõ▌å45ĪŃĪŻčbį┌▌åūėų▄ć·Ą─▌üūė╩Ū▒╗äėĄ─Ż¼▌åĄ─ų„▌S╩ŪWę╗Ą─┼cäė┴”Ą─▀BĮėĪŻ▀@ ĘNįOėŗĄ─ā׳c╩ŪŻ║ļm╚╗▌åūėą²▐DāH═©▀^ų„▌S╠ß╣®äė┴”Ż¼Ą½▌åūėęį║▄ąĪĄ──”▓┴Ż¼┐╔ęį čžįSČÓ┐╔─▄Ą─▄ē█E░┤šš▀\äėīWįŁ└ĒęŲäėŻ¼Č°▓╗āHāH╩ŪŽ“Ū░╗“š▀Ž“║¾ęŲäėĪŻŪ“ą╬▌å ╩Ūę╗ĘNšµš²Ą─╚½Ž“▌åŻ¼┐╔ęįįOėŗ│╔čž╚╬║╬ĘĮŽ“╩▄äė┴”ą²▐DĪŻ
(3)▄ć▌åų¦ō╬ÖCśŗŻ║▄ć▌åų¦ō╬ÖCśŗ╬╗ė┌▄ć▌å┼c▄ć¾wų«ķgŻ¼øQČ©ā╔š▀į┌┐šķg╔ŽĄ─ ĻPŽĄŻ¼░³└©ūįė╔Č╚į┌ā╚ĪŻ▄ć▌åų¦ō╬ÖCśŗ│ą▌d▄ć▌åęį╔Ž▓┐ĘųĄ─▌d║╔Ż¼▓óīó╦³ĘųĮŌĄĮĖ„ éĆ▄ć▌å╔ŽŻ¼æęÆņčbų├ĪóŠÅø_čbų├ę▓æ¬įō░³║¼į┌▄ć▌åų¦ō╬ÖCśŗų«ā╚ĪŻ
(4)“īäėÖCśŗŻ║Z│ŻęŖĄ─▄ć▌å“īäėĘĮ╩Į╩Ūė├ļŖÖCĮø▀^£p╦┘Ų„║¾ų▒Įė“īäė▄ć▌å Ą─▄ć▌SĪŻ▌å╩ĮęŲäėÖCŲ„╚╦į┌ČÓöĄł÷║ŽųąČ╝╩Ū├┐éĆ▄ć▌åėąĖ„ūįĄ─“īäėčbų├Ż¼Ęųäe▀M ąą╦┘Č╚┐žųŲĪŻīŹļH╔Ž┼cęŲäė├µĮėė|Ą─▄ć▌åŻ¼╝┤╩╣╦³▒Š╔Ē▓╗ų▒Įė▒╗“īäėą²▐DŻ¼ę▓╩Ū─▄ ē“«a╔·“īäė┴”Ą─Ż¼└²╚ń╚½ĘĮ╬╗▄ć▌åĄ─ęŲäėÖCśŗĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |