
“ī(q©▒)äė(d©░ng)Ų„═Ōų├ņ`Ū╔╩ųėąā╔éĆ(g©©)ā×(y©Łu)³c(di©Żn)Ż║
Ż¼“ī(q©▒)äė(d©░ng)Ų„═Ōų├╩╣Ą├ÖC(j©®)ąĄ╩ų▒Š¾wĄ─įO(sh©©)ėŗ(j©¼)┐╔ęįį┌ūŃē“Ą─┐šķgā╚(n©©i)š╣ķ_(k©Īi)Ż¼Å─Č°╩╣Ą├ņ`Ū╔╩ųĄ─═Ōė^įO(sh©©)ėŗ(j©¼)Ė³╝ėöM╚╦╗»Ż¼╩ųųĖ▒Š¾wĖ³╝ė└w╝Ü(x©¼)ĪŻ
Ą┌Č■Ż¼“ī(q©▒)äė(d©░ng)Ų„▀x ą═┐╔ęįĖ³╝ėūįė╔Ż¼┐╔ęį▓╔ė├Ė³┤¾Ą─“ī(q©▒)äė(d©░ng)ļŖÖC(j©®)Ż¼Å─Č°į÷┤¾╩ųųĖĄ─▌ö│÷┴”ĪŻ
“ī(q©▒)äė(d©░ng)Ų„═Ōų├ņ`Ū╔╩ųĄ─Ąõą═┤·▒Ē«a(ch©Żn)ŲĘ░³└©├└ć°(gu©«)Ą─ DARPA Extrinsic ņ`Ū╔╩ųĪóNASAŻ©├└ć°(gu©«)ėŅ║Į ųąą─Ż®║═ GM(═©ė├╣½╦Š)┬ō(li©ón)║ŽčąųŲĄ─ Robonaut 2 ņ`Ū╔╩ųĪŻ
DARPA Extrinsic ņ`Ū╔╩ųė╔├└ć°(gu©«)ć°(gu©«)Ę└▓┐čąųŲŻ¼įō╩ųŠ▀ėą 5 éĆ(g©©)╩ųųĖŻ¼ŲõļŖÖC(j©®)║═é„äė(d©░ng)ŽĄĮy(t©»ng) Č╝╝»│╔į┌Ū░▒█Ż¼▒╗ĘQ×ķ CobotĪŻŪ░▒█ Cobot ė╔ 1 éĆ(g©©) 30W Ą─äė(d©░ng)┴”ļŖÖC(j©®)║═ 15 éĆ(g©©)▓┘┐vļŖÖC(j©®) ĮM│╔ĪŻäė(d©░ng)┴”ļŖÖC(j©®)╩Ū Cobot Ą─ų„“ī(q©▒)äė(d©░ng)į¬╝■Ż¼čžįōļŖÖC(j©®)Ą─▌ö│÷▌S▓╝ų├ų° 5 éĆ(g©©)łA▒P(p©ón)Ż¼├┐éĆ(g©©)łA ▒P(p©ón)ā╚(n©©i)Č╝╝»│╔ėą 3 éĆ(g©©) CVT čbų├ĪŻCVT čbų├ė╔▓┘┐vļŖÖC(j©®)Īó╬╗ų├é„ĖąŲ„Īóäė(d©░ng)┴”é„äė(d©░ng)Ū“Īó▓┘┐v ▌ü║══¼▓Į²X▌åĮM│╔Ą─Ż¼─▄ē“Ė∙ō■(j©┤)ąĶ꬚{(di©żo)š¹▐D(zhu©Żn)Šž║═╦┘Č╚ĪŻ
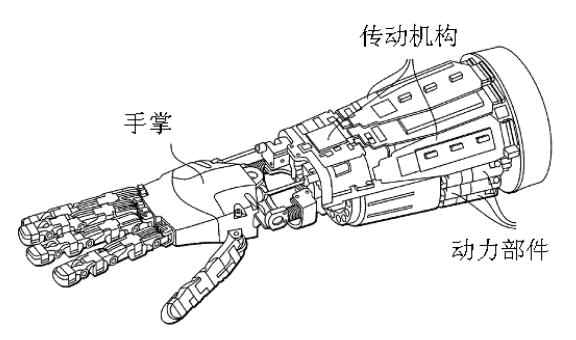
Robonaut 2 ╩Ū NASA ║═ GM ┬ō(li©ón)║ŽčąųŲĄ─ņ`Ū╔╩ųŻ¼įō╩ųėą 18 éĆ(g©©)╗Ņäė(d©░ng)ĻP(gu©Īn)╣Ø(ji©”)Īó12 éĆ(g©©)ūįė╔Č╚Ż¼ ╩ų┼c═¾▓┐Ą─╦∙ėąļŖÖC(j©®)║═ļŖ┬Ęęį╝░ļŖį┤ŠĆ║═üĒ(l©ói)ūį╔Ž▒█Ą─═©ėŹČ╝╝»│╔į┌Ū░▒█ā╚(n©©i)Ż¼ŲõųąŻ¼ļŖ į┤ŠĆėą 6 Ė∙ĪŻ╩ųĄ─ėąą¦žō(f©┤)▌d│¼▀^(gu©░) 9kgŻ¼╩ųųĖį┌│õĘų╔ņš╣Ģr(sh©¬)┐╔ęį│ą╩▄ 2.25kg Ą─ųĖ╝Ō┴”Ż¼ ųĖ╝Ō╦┘Č╚│¼▀^(gu©░) 200mm/sĪŻ
“ī(q©▒)äė(d©░ng)Ų„═Ōų├ņ`Ū╔╩ųę▓ėąā╔éĆ(g©©)╚▒³c(di©Żn)Ż║
Ż©1Ż®“ī(q©▒)äė(d©░ng)Ų„┼c╩ų▒Š¾wų«ķgŠÓļx▀h(yu©Żn)Ż¼ąĶę¬ĮĶų·ļņīŹ(sh©¬)¼F(xi©żn)ā╔š▀ Ą─▀BĮėŻ¼é„ĖąŲ„½@Ą├ą┼Žó▓ó▓╗─▄Ę┤ė│ņ`Ū╔╩ų╩ųųĖĻP(gu©Īn)╣Ø(ji©”)╬╗ų├║═ĻP(gu©Īn)╣Ø(ji©”)“ī(q©▒)äė(d©░ng)┴”Ż¼į÷╝ė┴╦┐žųŲŲ„įO(sh©©)ėŗ(j©¼)Ą─ļyČ╚ĪŻ
Ż©2Ż®┐╔ŠSūo(h©┤)ąį▓ŅŻ¼«ö(d©Īng)─│Ė·ļņöÓ┴čĢr(sh©¬)Ż¼ąĶę¬▀M(j©¼n)ąąņ`Ū╔╩ųš¹¾wĄ─▓ąČŻ¼╣żū„┴┐┤¾ĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°(sh©▒)^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |