| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
į┌┤¾▓┐Ęų蹊┐╬─½I(xi©żn)ųąČ╝īó▌åūėįO(sh©©)Č©×ķäé¾wŻ¼▓╗┐╔ūāą╬Ą─łA▒PŻ¼▓óīó▌åūė┼cĄž├µĄ─ŽÓ╗źū„ė├šJ(r©©n)ū„╩Ū³c(di©Żn)Įėė|ĪŻīŹ(sh©¬)ļHųąŻ¼┤¾▓┐Ęų▌åūė╩Ūė╔┐╔ūāą╬▓─┴Ž(╚ńŽ─z)ųŲ│╔Ż¼╦∙ęįŽÓ╗źū„ė├╩ŪĮėė|├µĪŻį┌▒Š╣Ø(ji©”)ųąŻ¼╝┘įO(sh©©)╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦ųžą─▓╗Ė▀Ż¼ę“┤╦«ö(d©Īng)ÖC(j©®)Ų„╚╦╝ė╦┘▀\(y©┤n)äė(d©░ng)Ģr(sh©¬)ė╔ųžą─Ų½Ė▀«a(ch©Żn)╔·Ą─Ė„▌åī”(du©¼)Ąžē║┴”Ą─ūā╗»║÷┬į▓╗ėŗ(j©¼)ĪŻ
╗∙ė┌▄ć▌väė(d©░ng)┴”īW(xu©”)└ĒšōŻ¼«ö(d©Īng)╚½ĘĮ╬╗ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦╝ė╦┘▀\(y©┤n)äė(d©░ng)Ģr(sh©¬)Ż¼“ī(q©▒)äė(d©░ng)▌å┼cĄž├µĄ─Įėė| ūāą╬╦∙«a(ch©Żn)╔·Ą─ŪąŽ“┴”╩Ū▄ć▌v╗“ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦▀\(y©┤n)äė(d©░ng)Ą─Ā┐ę²“ī(q©▒)äė(d©░ng)┴”ĪŻų╗ę¬▌åūė║═Ąž├µķg Ą─Įėė|ģ^(q©▒)ė“Ż¼╝┤▌åūėĮėĄžėĪ█E╔Ž│ą╩▄ŪąŽ“┴”Ż¼Š═Ģ■(hu©¼)│÷¼F(xi©żn)▓╗═¼│╠Č╚Ą─┤“╗¼Ż¼ę“┤╦ć└(y©ón)Ė± üĒ(l©ói)ųv└ĒŽļ╝āØLäė(d©░ng)╝┘įO(sh©©)Śl╝■▓ó▓╗Ę¹║ŽīŹ(sh©¬)ļHŪķørĪŻīó╝ė╦┘▀^(gu©░)│╠ųąĄ─▄ć▌åĄ─┤“╗¼£pĄĮZ╔┘╩ŪÖC(j©®)Ų„╚╦▀\(y©┤n)äė(d©░ng)┐žųŲĄ──┐ś╦(bi©Īo)Ż¼Č°ī”(du©¼)å╬éĆ(g©©)▌åūė▀M(j©¼n)ąąäė(d©░ng)┴”īW(xu©”)Ęų╬÷╩ŪŪ░╠ßĪŻ
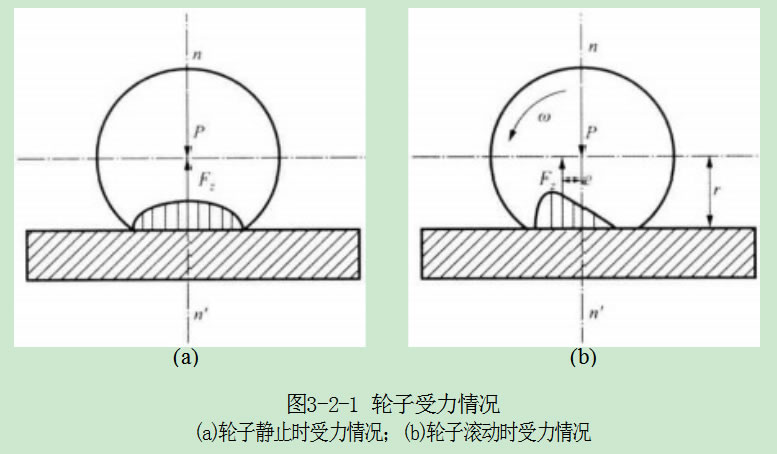
«ö(d©Īng)▌åūėį┌Ąž├µ╔ŽØLäė(d©░ng)Ģr(sh©¬)Ż¼▌åūė┼cĄž├µį┌Įėė|ģ^(q©▒)ė“ā╚(n©©i)«a(ch©Żn)╔·Ą─Ė„ĘNŽÓ╗źū„ė├┴”║═ ŽÓæ¬(y©®ng)Ą─ūāą╬Č╝░ķļSų°─▄┴┐ōp╩¦Ż¼▀@ĘN─▄┴┐ōp╩¦╩Ū«a(ch©Żn)╔·ØLäė(d©░ng)ūĶ┴”Ą─Ė∙▒ŠįŁę“ĪŻ×ķ┴╦ ╠ßĖ▀ÖC(j©®)Ų„╚╦Ą─╝ė╦┘ąį─▄Ż¼║▄ČÓ▌åūėČ╝▓╔ė├Ž─z▌å╗“Ųõ╦¹Š▀ėą╦▄ąįūāą╬Ą─▓─┴ŽųŲ│╔Ż¼ Č°Ūęę╗ą®╝ęė├ÖC(j©®)Ų„╚╦╗“Ŗ╩śĘ(l©©)ÖC(j©®)Ų„╚╦(ūŃŪ“ÖC(j©®)Ų„╚╦)Č╝Ģ■(hu©¼)į┌Ąž╠║╔Ž▀\(y©┤n)äė(d©░ng)Ż¼Å─Č°╩╣ÖC(j©®)Ų„ ╚╦▀\(y©┤n)äė(d©░ng)Ģr(sh©¬)Ė³╚▌ęū«a(ch©Żn)╔·ØLäė(d©░ng)ūĶ┴”ĪŻš²╩Ū▀@ĘNÅŚąįūāą╬«a(ch©Żn)╔·Ą─ÅŚąį▀t£■ōp╩¦ą╬│╔┴╦ūĶ ĄK▌åūėØLäė(d©░ng)Ą─ę╗ĘNūĶ┴”┼╝Ż¼«ö(d©Īng)▌åūėų╗╩▄ÅĮŽ“▌d║╔Č°▓╗ØLäė(d©░ng)Ģr(sh©¬)Ż¼Ąž├µī”(du©¼)▌åūėĄ─Ę©Ž“Ę┤ ū„ė├┴”Ą─Ęų▓╝╩ŪŪ░║¾ī”(du©¼)ĘQĄ─Ż¼Ųõ║Ž┴”F. ┼cĘ©Ž“▌d║╔P ųž║Žė┌Ę©ŠĆn-n 'ĘĮŽ“Ż¼╚ńłD 3-2-1(a) ╦∙╩ŠĪŻ«ö(d©Īng)▌åūėØLäė(d©░ng)Ģr(sh©¬)Ż¼į┌Ę©ŠĆnn 'Ū░║¾ŽÓī”(du©¼)æ¬(y©®ng)³c(di©Żn)ūāą╬ļm╚╗ŽÓ═¼Ż¼Ą½ė╔ė┌ÅŚ ąį▀t£■¼F(xi©żn)Ž¾Ż¼╠Äė┌╝ė▌dē║┐s▀^(gu©░)│╠Ą─Ū░▓┐Ą─Ąž├µĘ©Ž“Ę┤ū„ė├┴”Š═Ģ■(hu©¼)┤¾ė┌╠Äė┌ąČ▌d╗ų Å═(f©┤)▀^(gu©░)│╠Ą─║¾▓┐Ą─Ąž├µĘ©Ž“Ę┤ū„ė├┴”ĪŻ▀@śėŠ═╩╣Ąž├µĘ©Ž“Ę┤ū„ė├┴”Ū░║¾Ą─Ęų▓╝▓ó▓╗ ī”(du©¼)ĘQŻ¼Č°╩╣╦³éāĄ─║Ž┴”F. ŽÓī”(du©¼)ė┌Ę©ŠĆnn 'Ž“Ū░ęŲ┴╦ę╗éĆ(g©©)ŠÓļxe, ęŖ(ji©żn)łD3-2-1(b), ╦³ ļSÅŚąį▀t£■ōp╩¦Ą─į÷┤¾Č°ūā┤¾ĪŻĘ©Ž“Ę┤ū„ė├║Ž┴”F₂ ┼cĘ©Ž“▌d║╔P ┤¾ąĪŽÓĄ╚Ż¼ĘĮŽ“ ŽÓĘ┤ĪŻ
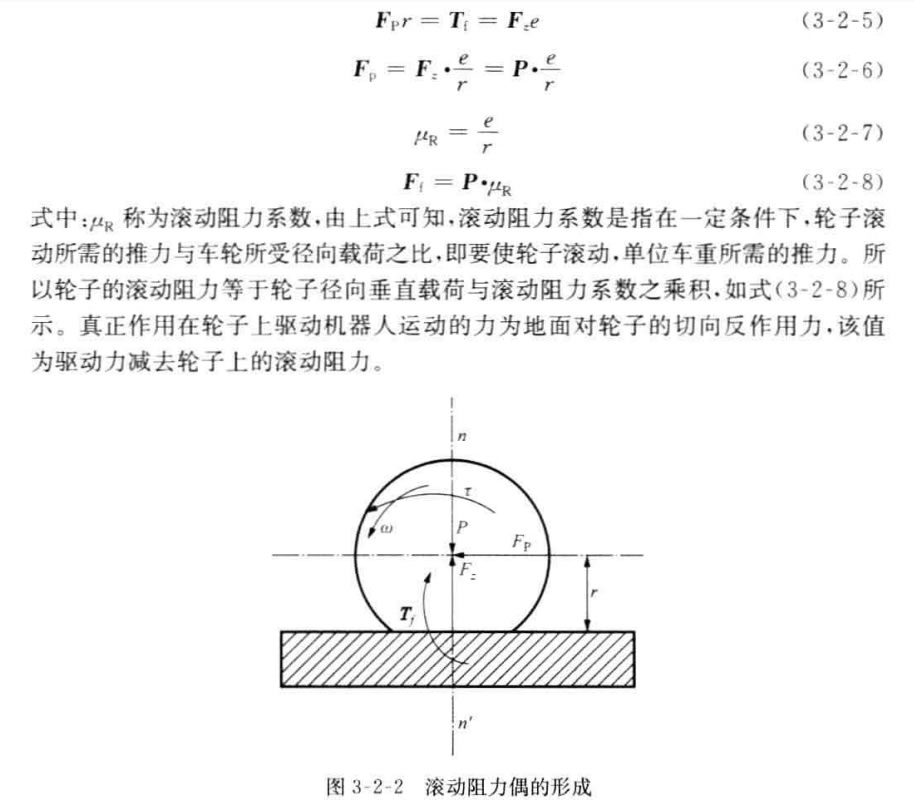
╚ń╣¹īóĘ©Ž“Ę┤ū„ė├┴”F. Ž“║¾ŲĮęŲų┴═©▀^(gu©░)▌åūėųąą─Ż¼┼cŲõ┤╣ŠĆųž║ŽŻ¼ät▌åūėį┌ Ąž├µ╔ŽØLäė(d©░ng)Ģr(sh©¬)Ą─╩▄┴”Ūķør╚ńłD3-2-2╦∙╩ŠŻ¼│÷¼F(xi©żn)ę╗éĆ(g©©)ĖĮ╝ėĄ─┴”┼╝ŠžT=F,e, ▀@éĆ(g©©) ūĶĄK▄ć▌åØLäė(d©░ng)Ą─┴”┼╝ŠžĘQ×ķØLäė(d©░ng)ūĶ┴”┼╝ŠžĪŻė╔łD3-2-2┐╔ų¬Ż¼ė¹╩╣▌åūėį┌Ąž├µ╔Ž ▒Ż│ųä“╦┘ØLäė(d©░ng)Ż¼ąĶę¬į┌▌å▌S╔Ž╝ėę╗“ī(q©▒)äė(d©░ng)┴”Šžr ╗“╩Ū╝ėę╗═Ų┴”Fp, Å─Č°┐╦Ę■╔Ž╩÷ØL äė(d©░ng)ūĶ┴”┼╝ŠžĪŻŽÓĻP(gu©Īn)öĄ(sh©┤)īW(xu©”)ĻP(gu©Īn)ŽĄ╚ńŽ┬╦∙╩ŠĪŻ
T=T=Fe (3-2-4)
łD3-2-3ųąĘųäe╩Ū“ī(q©▒)äė(d©░ng)▌åĪóÅ─äė(d©░ng)▌åį┌╝ė╦┘▀^(gu©░)│╠ųąĄ─╩▄┴”łDĪŻĖ„ģóöĄ(sh©┤)šf(shu©Ł)├„╚ńŽ┬Ż║ R,r Ęųäe×ķ“ī(q©▒)äė(d©░ng)▌å║═Å─äė(d©░ng)▌åĄ─░ļÅĮŻ¼P,P, ×ķ╚½ĘĮ╬╗▌åĪóÅ─äė(d©░ng)▌å╔ŽĄ─▌d║╔Ż¼N,Np ×ķ Ąž├µī”(du©¼)“ī(q©▒)äė(d©░ng)▌åĪóÅ─äė(d©░ng)▌åĄ─Ę©Ž“Ę┤ū„ė├┴”Ż¼faĪżfm ▒Ē╩Šū„ė├į┌“ī(q©▒)äė(d©░ng)▌åĪóÅ─äė(d©░ng)▌å╔ŽĄ─Ąž ├µŪąŽ“Ę┤ū„ė├┴”Ż¼F(xi©żn), ╩Ū“ī(q©▒)äė(d©░ng)▌SĪóÅ─äė(d©░ng)▌Sū„ė├ė┌“ī(q©▒)äė(d©░ng)▌åĪóÅ─äė(d©░ng)▌åĄ─ŲĮąąė┌Ąž├µĄ─ ┴” Ż¼M,M, ╩Ū“ī(q©▒)äė(d©░ng)▌åĪóÅ─äė(d©░ng)▌åØLäė(d©░ng)ūĶ┴”┼╝ŠžŻ¼į┌ÖC(j©®)Ų„╚╦▌d║╔ę╗Č©Ą─ŪķørŽ┬Ż¼Į³╦Ų▓╗ ūāĪŻEe ĪŻ ×ķ“ī(q©▒)äė(d©░ng)▌åĪóÅ─äė(d©░ng)▌åĄ─ĮŪ╝ė╦┘Č╚Ż¼a,an ×ķ“ī(q©▒)äė(d©░ng)▌åĪóÅ─äė(d©░ng)▌å▌Są─ŲĮąąė┌Ąž├µ Ą─╝ė╦┘Č╚Ż¼JaJ, Ęųäe×ķų„äė(d©░ng)▌å┼cÅ─äė(d©░ng)▌åĄ─▐D(zhu©Żn)äė(d©░ng)æT┴┐Ż¼T ×ķļŖÖC(j©®)ū„ė├ė┌“ī(q©▒)äė(d©░ng)▌åĄ─▐D(zhu©Żn) ŠžŻ¼ea,e, ╩Ūė╔ė┌▌åūė┼cĄž├µų«ķgĄ─ėĪ█E▒Ē├µ╔Ž┤µį┌ų°ē║┴”Ęų▓╝å¢(w©©n)Ņ}Ż¼Č°╩╣Ą├Ąž├µ ī”(du©¼)▌åūėĘ©Ž“Ę┤ū„ė├┴”Ų½ęŲĄ─ŠÓļxĪŻ Ė∙ō■(j©┤)łD3-2-3╦∙╩Š╩▄┴”ŪķørŻ¼“ī(q©▒)äė(d©░ng)▌å┼cÅ─äė(d©░ng)▌åĄ─äė(d©░ng)┴”īW(xu©”)─Żą═Ęųäe╚ń╩Į(3-2-9)Īó ╩Į(3-2-10)╦∙╩ŠĪŻŲõųąma ╩Ū“ī(q©▒)äė(d©░ng)▌å┘|(zh©¼)┴┐Ż¼m,╩ŪÅ─äė(d©░ng)▌å┘|(zh©¼)┴┐ĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖC(j©®)Ų„╚╦ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |